Chào các ae trong forum, sau một thời gian dài nghiên cứu qua google em đã tìm ra cách chế vô lăng tốt nhất cho ae thích chế cháo nhá.Số vòng quay có thể từ 180 độ đến 2160 độ tức là tầm nửa vòng đến 3 vòng từ giữa, tha hồ mà quay nhá.
Đặc biệt là nếu quay lố vòng cũng không sao, các bác quay lại nó sẽ trả lại như cũ, không như bộ UNO quay lố trả lại sẽ bị lệch điểm giữa.
P1: Phản hồi lực là gì?
P2: Chuẩn bị
Phần cứng

Đặc biệt là nếu quay lố vòng cũng không sao, các bác quay lại nó sẽ trả lại như cũ, không như bộ UNO quay lố trả lại sẽ bị lệch điểm giữa.
P1: Phản hồi lực là gì?
- Phản hồi lực hiểu đơn giản giống như các bác chạy xe ô tô ngoài đường vậy, phi qua ổ gà ổ voi thì lực từ bánh xe phản hồi về tay lái các bác ấy, giờ trong game cũng thế.
P2: Chuẩn bị
Phần cứng
- Arduino Leonardo 1 cái
- 1 encoder tầm 100 xung trở lên càng cao càng mượt, nếu mà motor gắn encoder càng tốt, chế thêm phản hồi lực cho nó nữa.
- Ai wave: http://www.aiwave.fr/wc_updates/1033/WheelConfig_0.21.exe
- Đây là phần mềm giao tiếp giữa con leonardo của các bác và máy tính các bác tải về cài đặt bình thường nhá
- Arduino: các bác vô trang arduino.cc để tải phiên bản mới nhất nhá
- Xloader: https://drive.google.com/open?id=0B4ZReHKFPKsBN01SMUdfbS11OWc phần mềm để nạp file hex vào leonardo
- File hex để nạp: http://www.aiwave.fr/downloads/FFBWheel.0.16.leonardo.hex
- Các bác giải nén phần mềm xloader ra và mở lên nhá, phần mềm này cần net4 nên các bác cài đặt net4 vô máy rồi mới chạy được nhá.Link cho bác nào cần net4: http://download.microsoft.com/downl...BC36-D6EA96C8DAAE/dotNetFx40_Full_x86_x64.exe
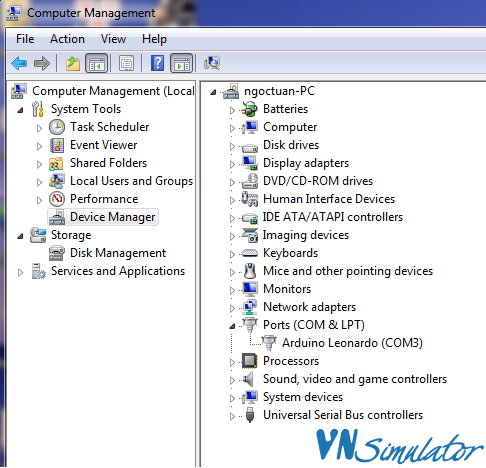
- Xác định cổng com của leonardo trong máy
-
- OK, mở phần mềm Xloader lên nào
-
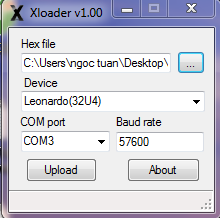
- Hex file các bác chọn file hex hồi nãy tải về nhá, chọn như trong hình là ok,cổng com tùy từng máy nhá, upload thôi.
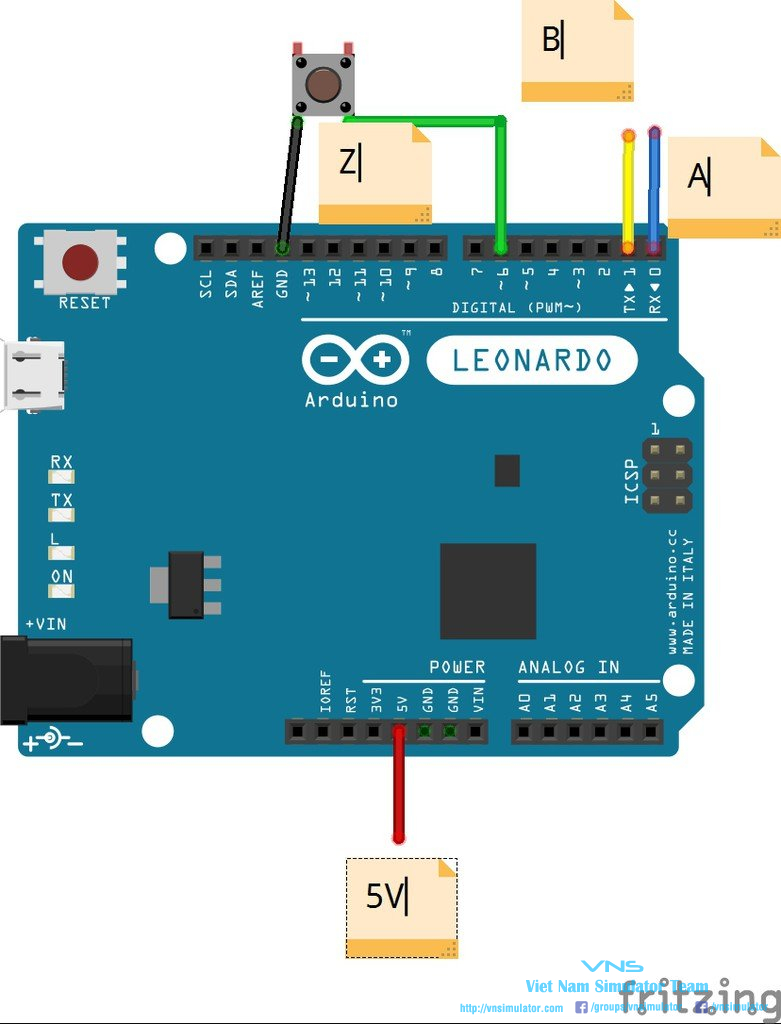
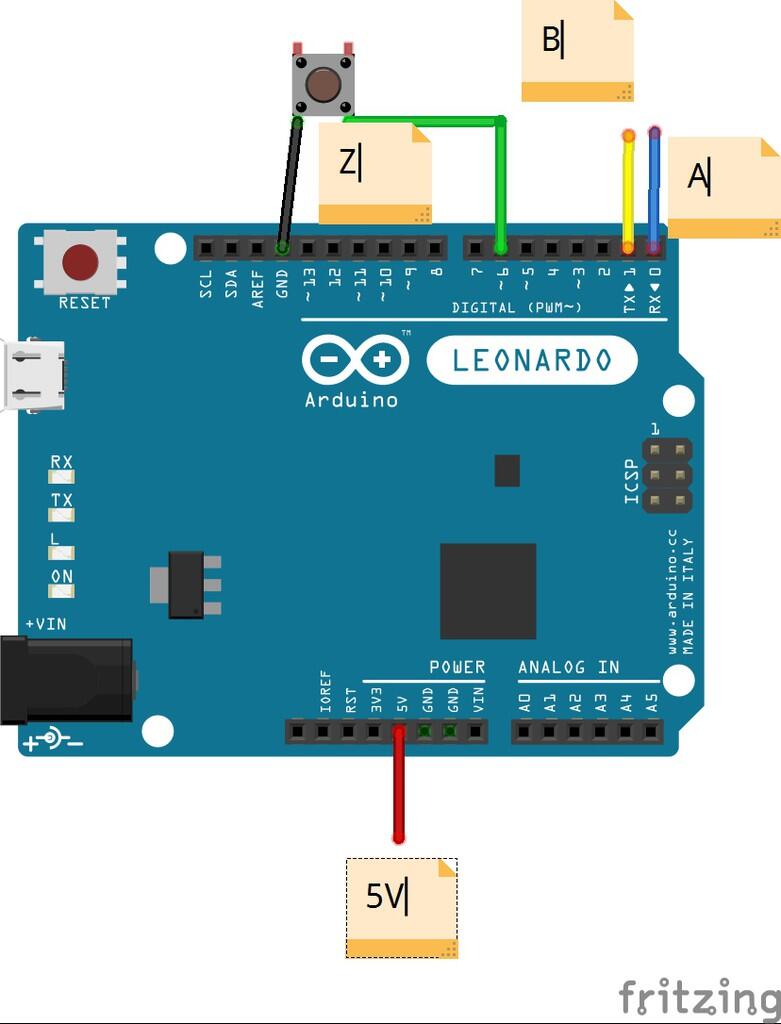
- Kết nối bộ driver với board nào, thông thường các bác mua encoder nếu các bác kết nối vô mà quay nó không nhận thì kéo thêm con điện trở 10k ôm cho mỗi kênh lên 5v nhá.nhớ nối chân GND chung nữa nhá
- Xung PWM xuất ra ở chân 10,11 để phản hồi lực, bác nào không xài phản hồi lực thì không cần quan tâm nó nhá
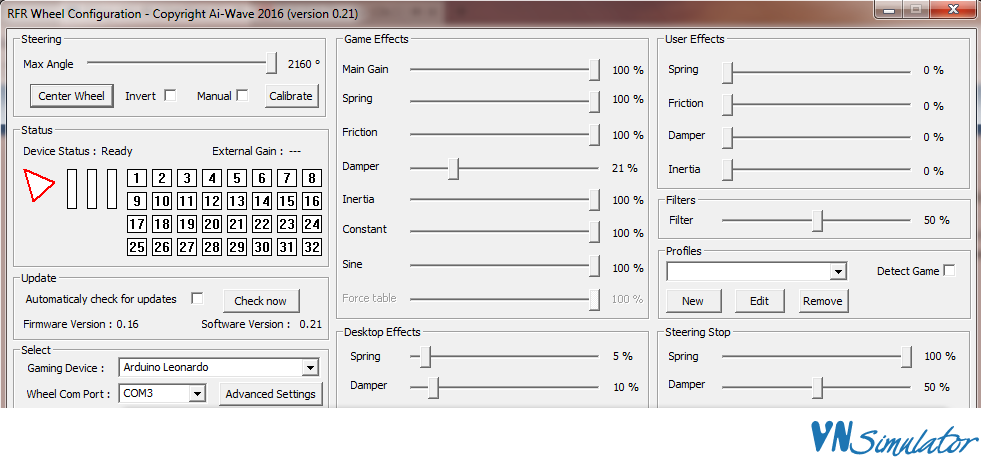
- Các bác mở phần mềm Ai wave lên nhá,chọn Gaming Device là Arduino Leonardo
- Phần max Angle là vô lăng các bác quay được bao nhiêu độ, cái này tùy các bác nhá, cho quay bằng nào thì nó quay bằng đó, điều chỉnh bằng phần mêm, quá ngon.
- Các phần khác là để điều chỉnh phản hồi lực cho vô lăng, do em mua con servo mà chưa đó driver để lái nó nên chưa review cho các bác coi được.
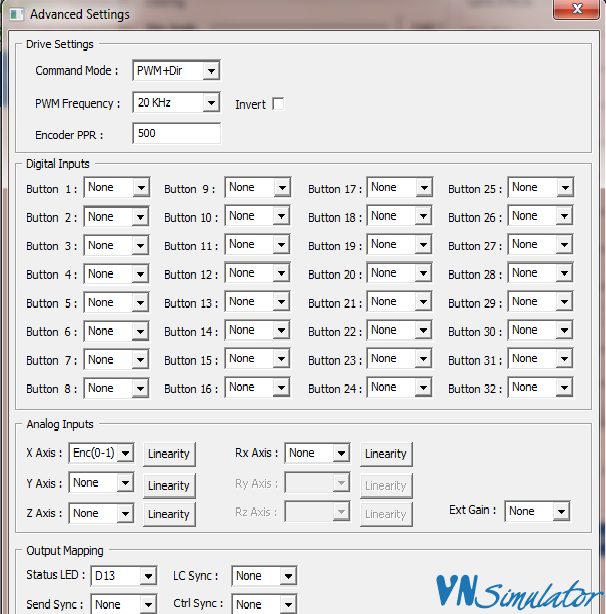
- Vô Advanced Settings phần PPR các bác nhập số xung của encoder của các bác vô nhá,mình là 500. Các chân ga, phanh, côn các bác có thể cài đặt các chân và nút trong phần này nhá
- Phần PWM là xuất xung để điều khiển con motor của các bác để phản hồi lực, bác nào không am hiểu điện tử thì không cần quan tâm nó nhiều đâu nhá

Chỉnh sửa lần cuối:

")